打开包装后,带屏幕的这个是机器人主机,正面是一块触摸屏
1. 硬件外观介绍
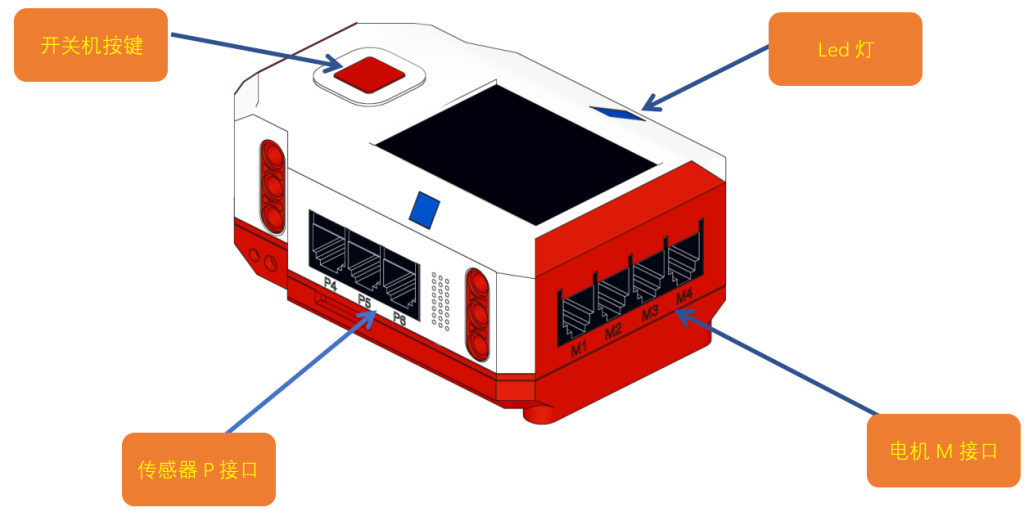
1.1关于主机
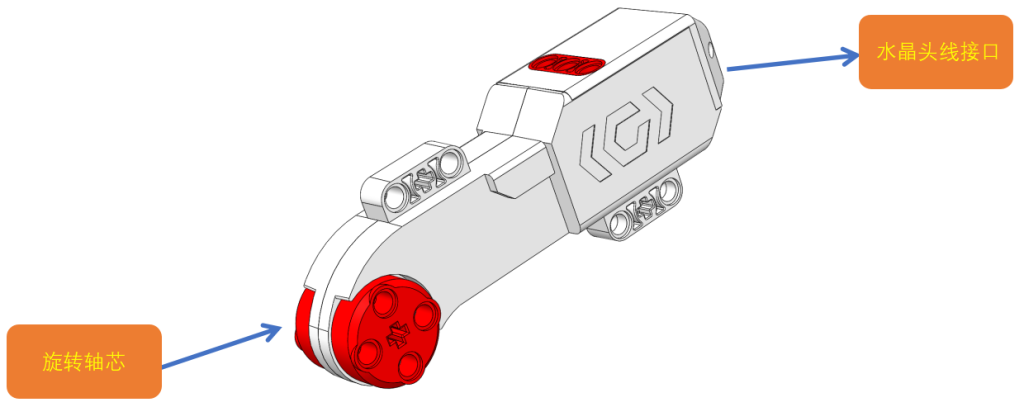
1.2大型编码电机
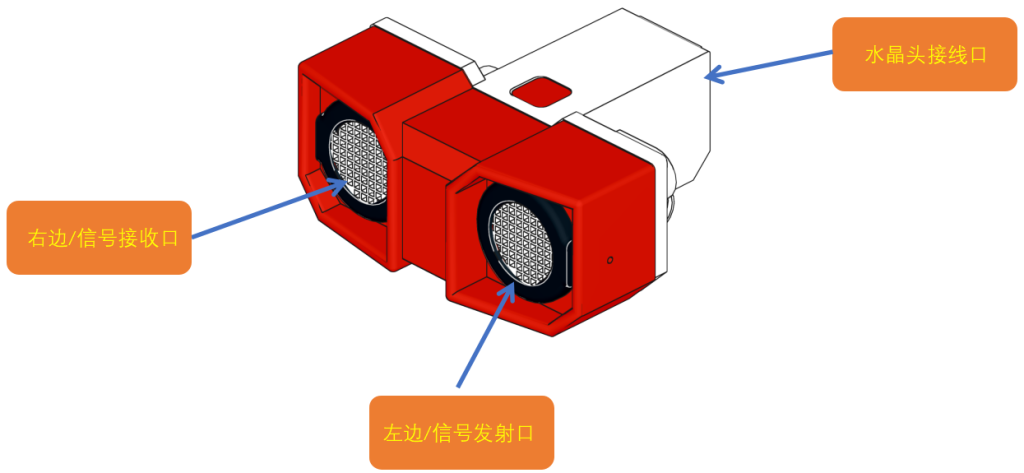
1.3超声波传感器
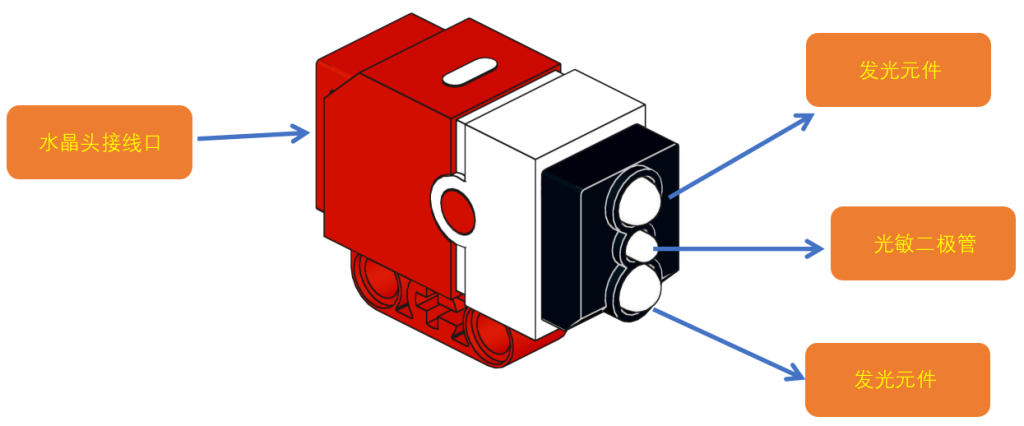
1.4光电传感器
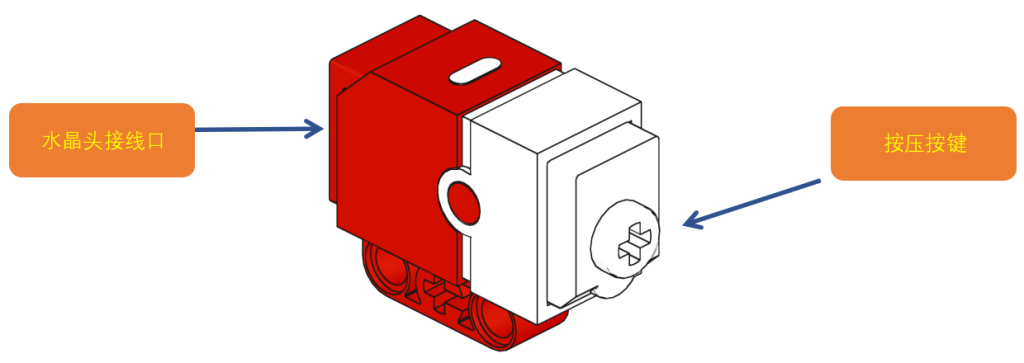
1.5触碰传感器
2.使用方法
2.1安装电池
先将电池固定在主机弹簧一侧,插入卡槽。此时电池左侧凸起,对准背部左侧缝隙,扣好,然后压紧,听到咔嗒一声,电池就装好了。按下P4处的电池卡扣,向外拉即可卸掉电池。

2.2充电
第一次使用设备时,应对设备充电,具体充电方法如下:
方式一:主机带电池充电
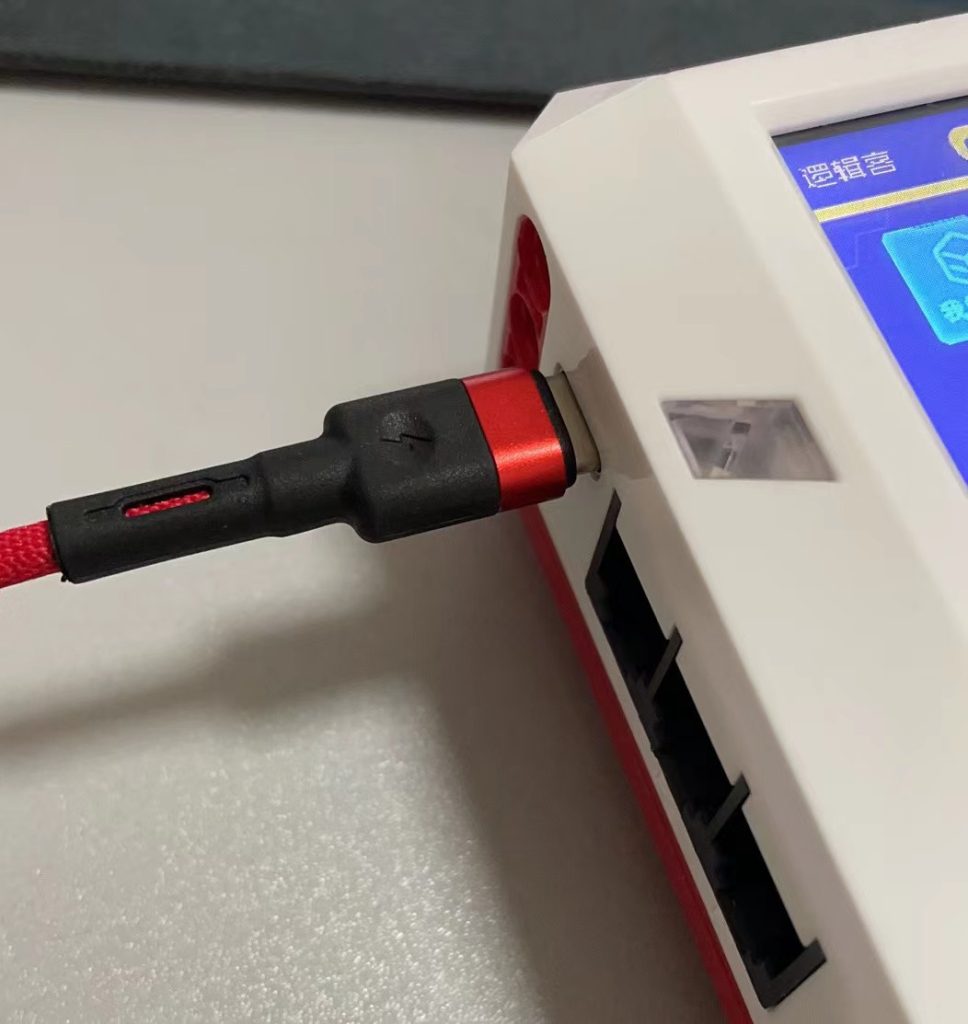
将充电线插入电池充电口

指示灯亮红灯,表示正在充电。 直到充电器变绿灯,同时主机屏幕电量显示100%,则表示电池充满。
方式二:使用充电器对电池单独充电 将电池与主机分离,单独对电池充电,具体方法同方式一。
2.3连接电机
将水晶头一端插入电机接口,听到咔嗒一声,并卡住,表示连接到位。将另一端,用同样方法,插到主机M1-M4接口。
2.4连接传感器
将水晶头一端插入传感器接口,将另一端,插到主机P1-P6接口。

2.5断开电机、传感器
按住水晶头小尾巴,向外拉,则水晶头线插头被断开。

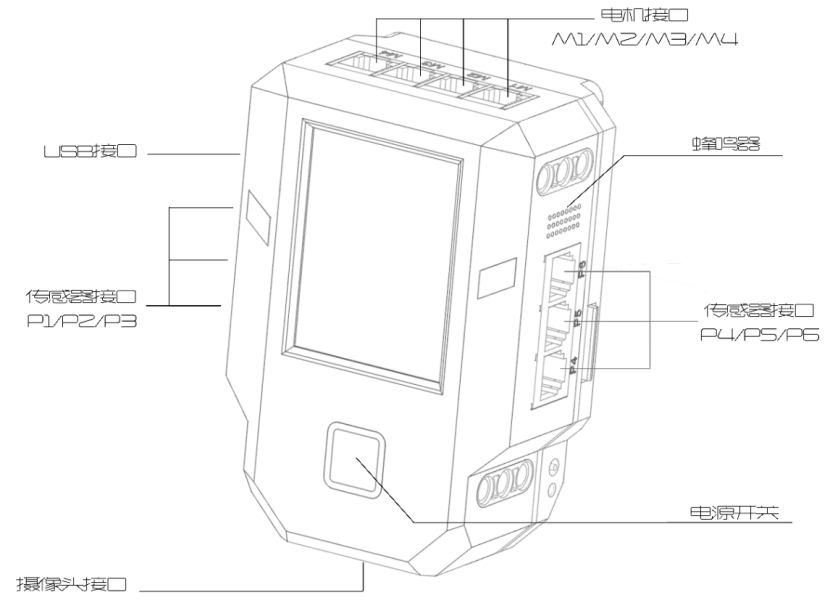
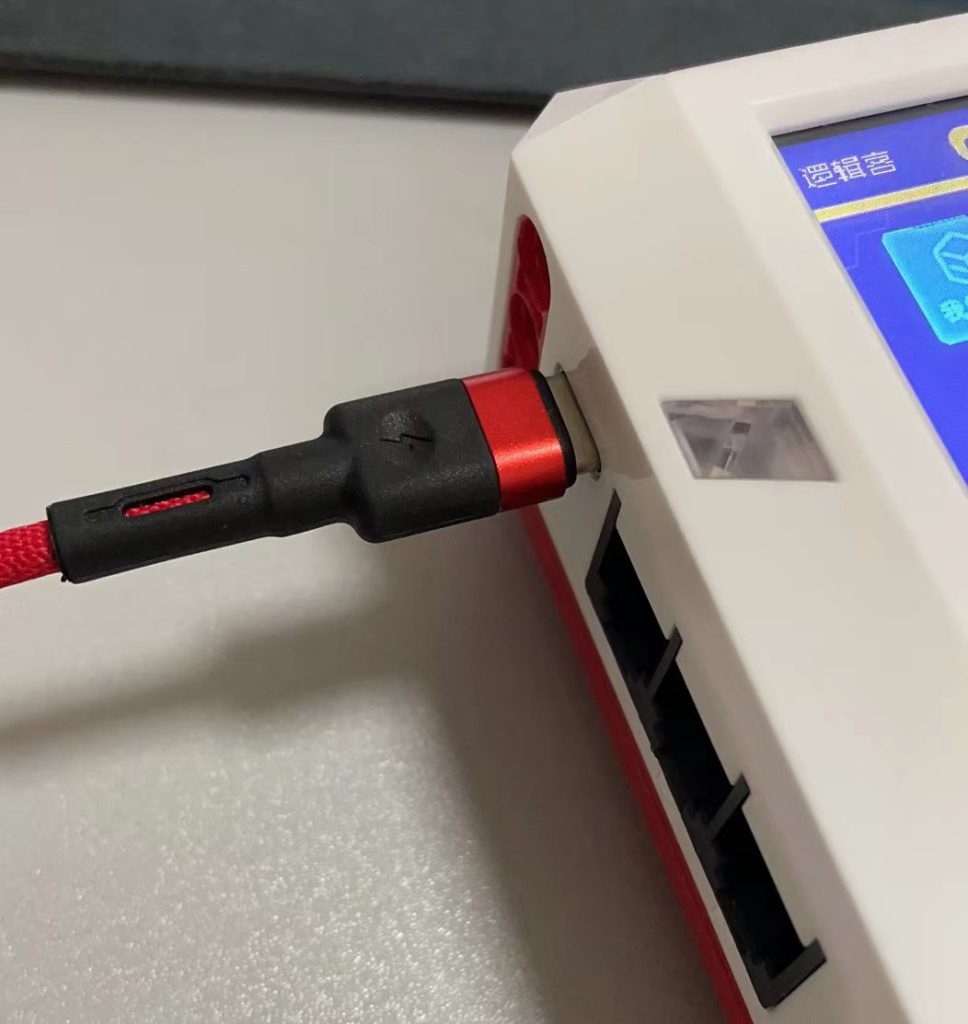
2.6.主机连接电脑
将下载线C口一端插入主机下载线接口,将usb口一端插入电脑usb接口。
3.功能选择
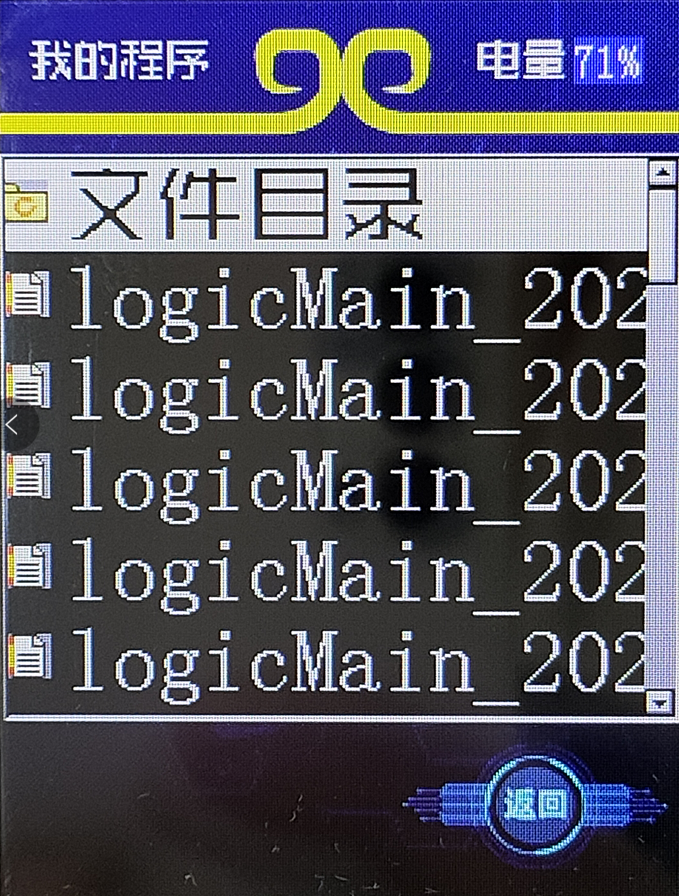
3.1执行程序
向机器人主机下载过的程序都会被记录在此区域

可以按照程序名称或者顺序,点击触摸屏,选择需要的程序。
程序选择后,主机显示此状态,则表示主机已经处于执行该条程序的状态。
特别提示:通常程序会按照下载的先后时间顺序显示,最后下载的程序显示在最上方。但部分情况下,程序会被按照名称排序,所以显示在最上方的程序,不一定是最后下载的。
3.2下载程序
将下载线C口一端插入主机下载线接口,将usb口一端插入电脑usb接口。
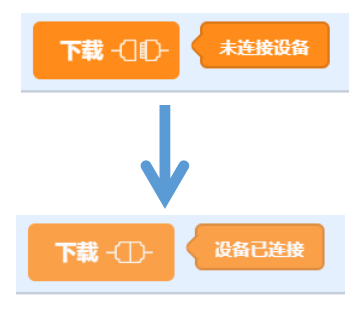
将主机和电脑连接好后,点击机器人主机中的下载模式图标,

电脑软件中的左上角的连接图标将由断开状态变化为已连接状态
点击电脑软件的下载图标,电脑将显示编译界面,表示正在下载。
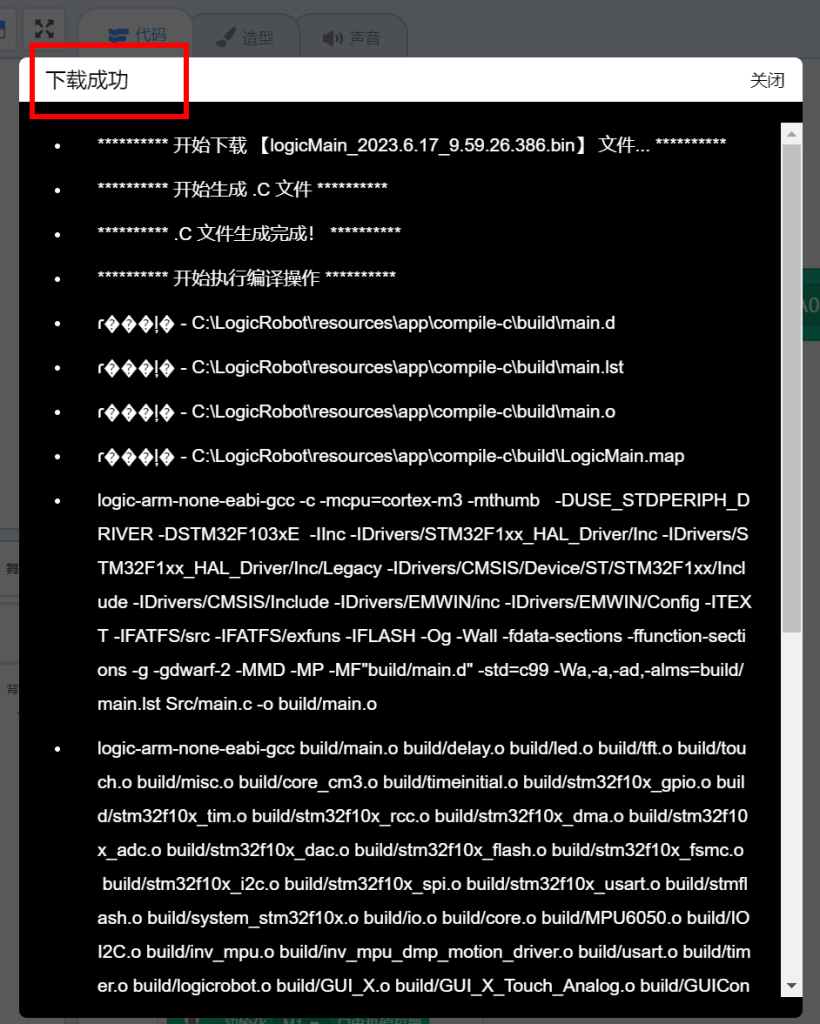
显示下载成功则表示已经下载完成,未下载成功不能断开设备。
3.3测试
点击测试模块

光电传感器测试
连接好主机与光电传感器后(如连接P1口),点击测试图标,然后再点击光电传感器测试图标,则出现如下界面:P1-P6分别对应端口1-端口6。
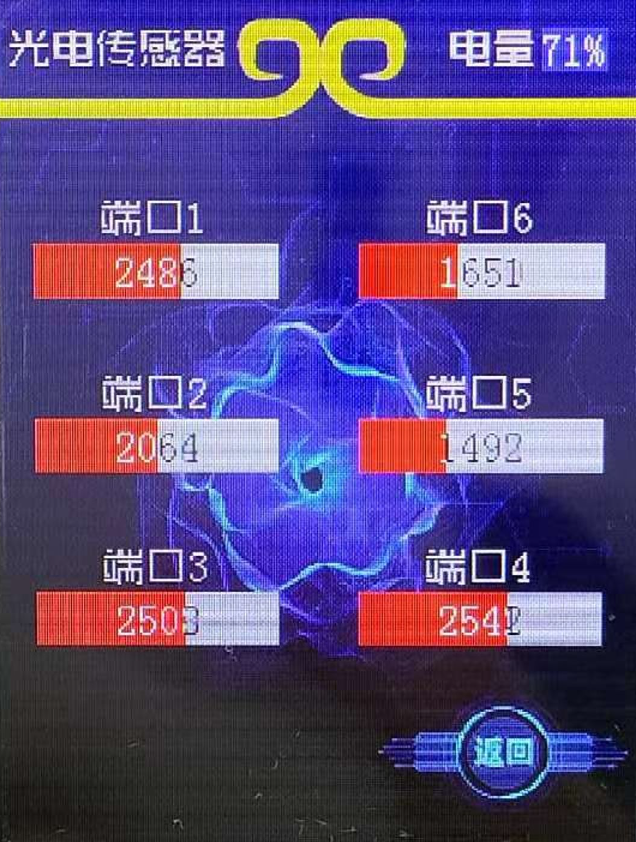
读出P1口光电传感器数值为2486,光电距离物体的高度不同则数值不同。测白色物体端口数值偏高,黑色物体端口数值偏低。
触碰传感器测试
连接好主机与触碰传感器后,点击测试图标,然后再点击触碰传感器测试图标,则出现如下界面:
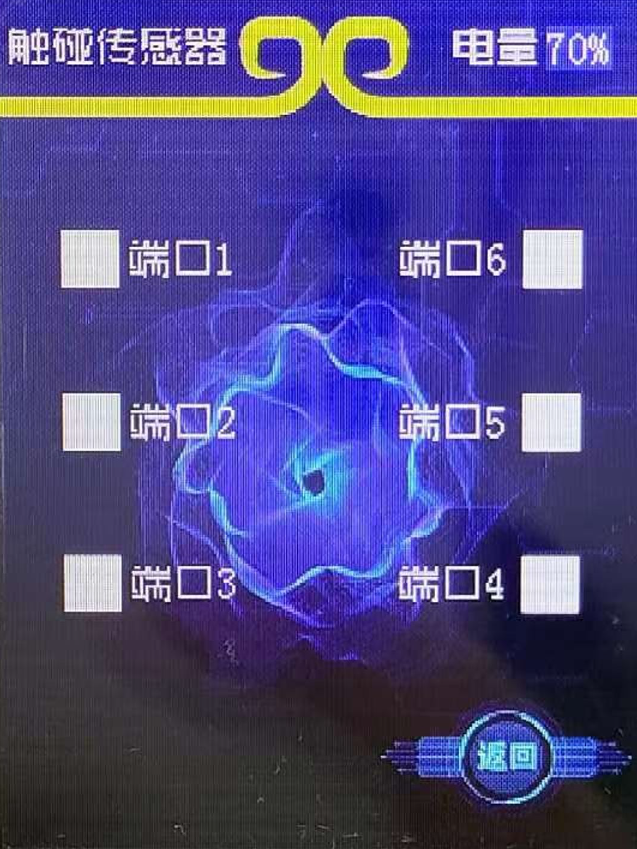
按下触碰传感器端口显示黑色。 端口显示白色表示没有按下。
超声波传感器测试
连接好主机与超声波传感器后,点击测试图标,然后再点击超声波传感器测试图标,则出现如下界面:

超声波传感器距离物体远近不同,则数据不同,数据单位是厘米CM。如上图测试出超声波传感器距离前面物体有15.9厘米。
超声波测试只能连接P1端口,不能连接其他端口,连错端口或者超声波传感器故障,则只会显示-1.0,如下图所示:
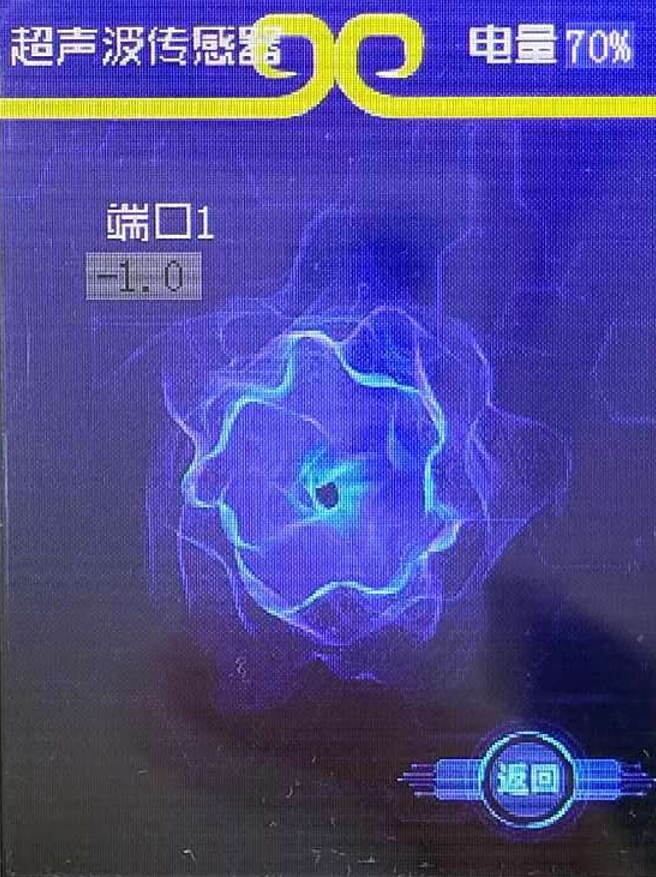
注:在编写程序时,超声波传感器可连接任意接口。
电机测试
连接好主机与电机后,点击测试图标,然后再点击电机测试图标,则出现如下界面:
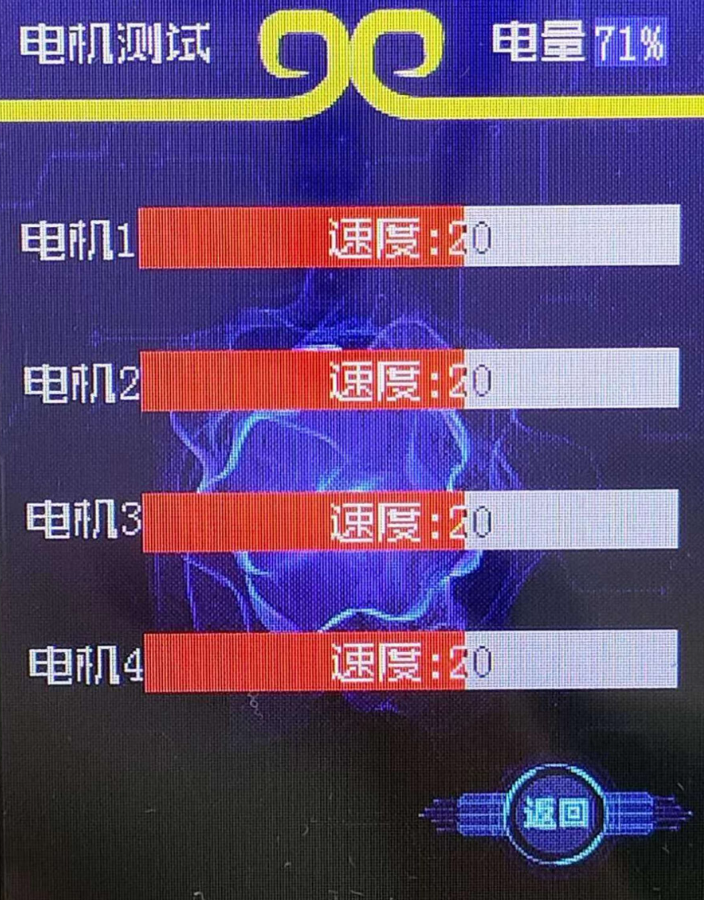
数据由0到100表示速度越来越快,再由100回到0,表示速度越来越慢,此时测试正转。
数据由0到-100表示速度越来越快,再由-100回到0,表示速度越来越慢,此时测试反转。
注:测试时,电机未做速度匹配,各电机可能有速度差异。但软件编程中,使用速度设置模块,均包含速度匹配功能(未校准电机除外)。
电机编码器测试
连接好主机与电机后,点击测试图标,然后再点击编码电机测试图标,则出现如下界面:
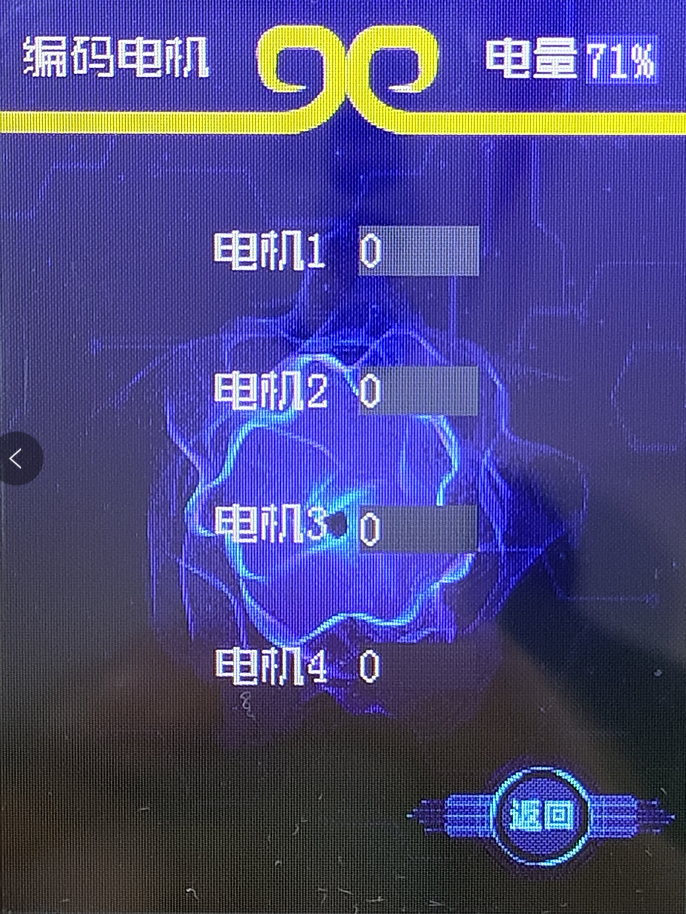
用手旋钮电机红色转芯,对应电机端口数值会有变化,正转数值累加,反转数值减少。
3.4设置LED彩灯

点击其他,点击LED彩灯,点击箭头可调整红色、绿色、蓝色的LED值,点击确定后两侧会出现灯光。不同的LED值会产生不同的灯光效果。
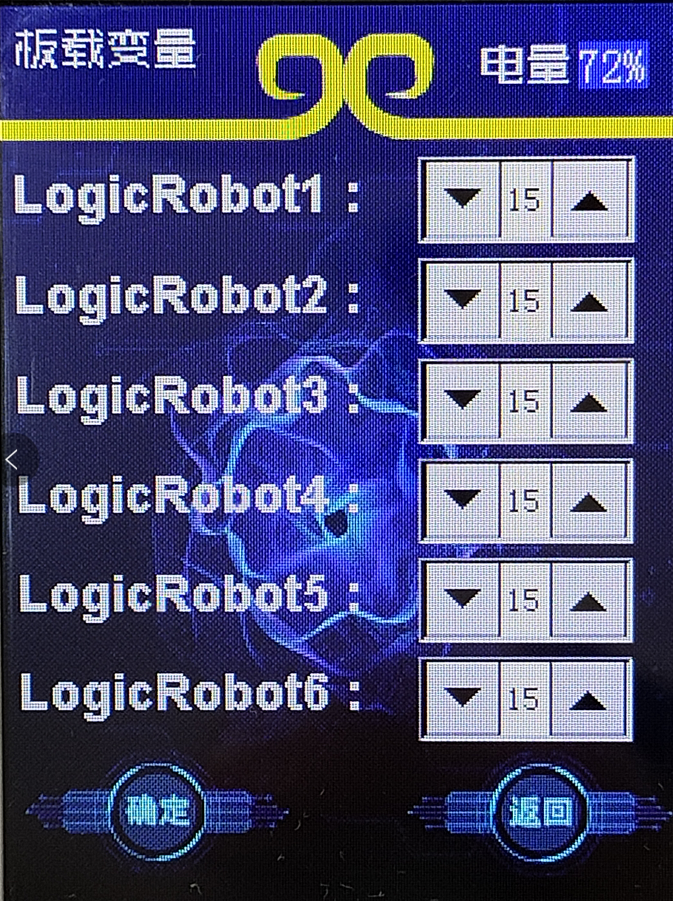
3.5设置板载变量
点击其他,点击板载变量,可以设置6个固定变量。
3.6 删除单个程序和清空程序
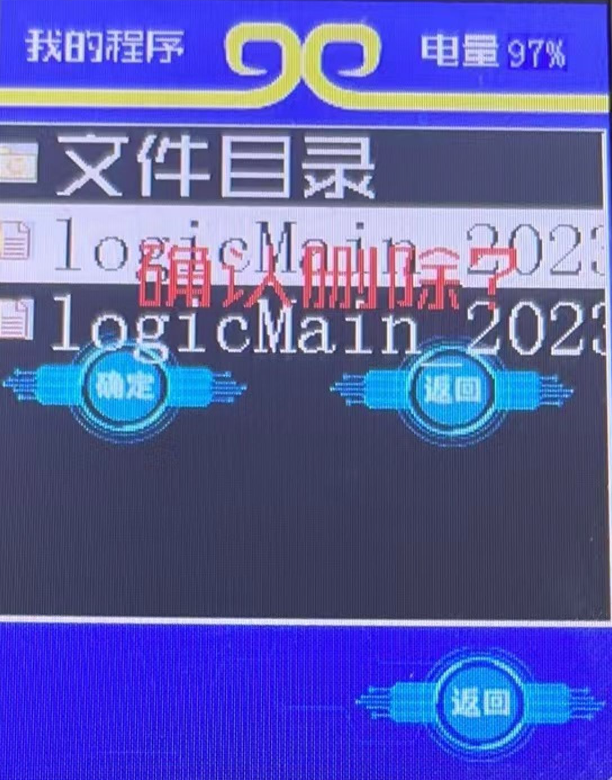
3.6.1删除单个程序
长按你想要删除的那个程序文件,会弹出来下图所示的删除功能,点击确定即可删除此程序文件,点击返回则不删除此程序文件。
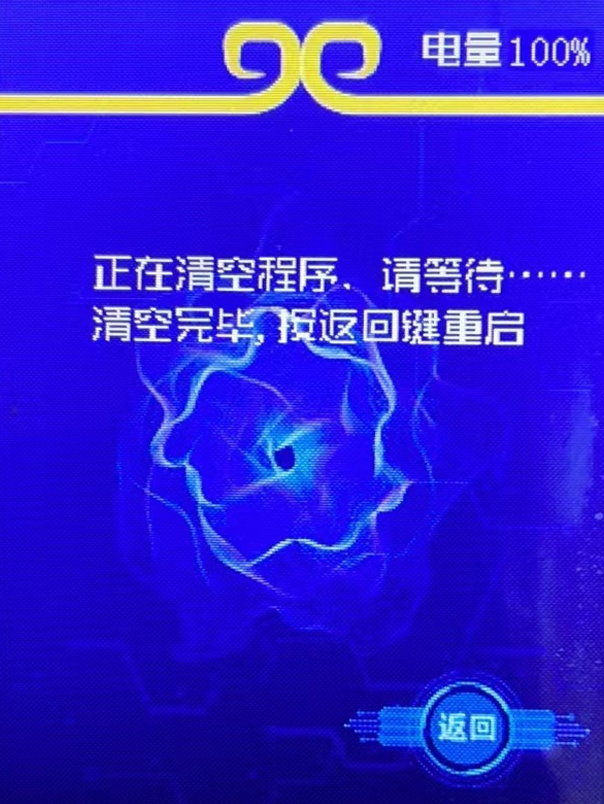
3.6.2清空全部程序
点击设置,点击清空程序,稍等20秒左右会弹出返回按钮,点击返回按钮或者按开关机键重启即可清空“我的程序”里面的所有程序。
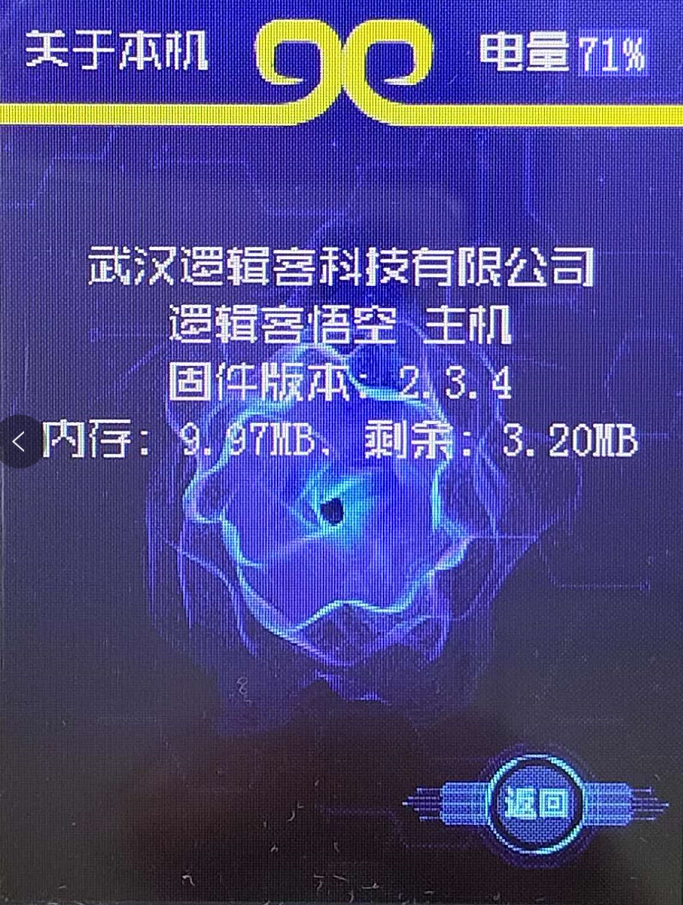
3.7查看固件版本和剩余内存
点击产品信息,即可查看系统基本信息。